— CASE STUDY
OpenAMR Dual-Arm Mobile Robot as a Groundwork Platform for Autonomous Toilet Cleaning and Industrial Service Robotics
A preliminary R&D use-case study exploring how the OpenAMR dual-arm mobile robot platform can be integrated with professional industrial steam-cleaning systems to create an advanced autonomous sanitation robot.
Platform
OpenAMRobot
Focus
Autonomous Sanitation
Stage
R&D, Prototype
Technologies
ROS2, Dual-Arm, AI Perception
Introduction
At OpenAMR, we develop modular open-source autonomous mobile robotic platforms designed as a flexible groundwork for industrial and service robotics applications.
Our goal is not only to build a robot for a single task, but to create a reusable robotic ecosystem that significantly reduces development time, hardware costs, and integration complexity for companies developing advanced robotic solutions.
One of the most promising directions we are currently researching is autonomous toilet and sanitary-area cleaning using dry steam sanitation technology, vacuum extraction, and intelligent robotic manipulation.
This article presents a preliminary R&D-oriented use-case study describing how the OpenAMR dual-arm mobile robot platform can be integrated with professional industrial steam-cleaning systems such as the Menikini MK4000 to create an advanced autonomous sanitation robot.
At the same time, the same robotic platform can also be reused for many other applications including logistics, manufacturing assistance, last-mile delivery, and collaborative industrial robotics.
Reusable Robotic Platform
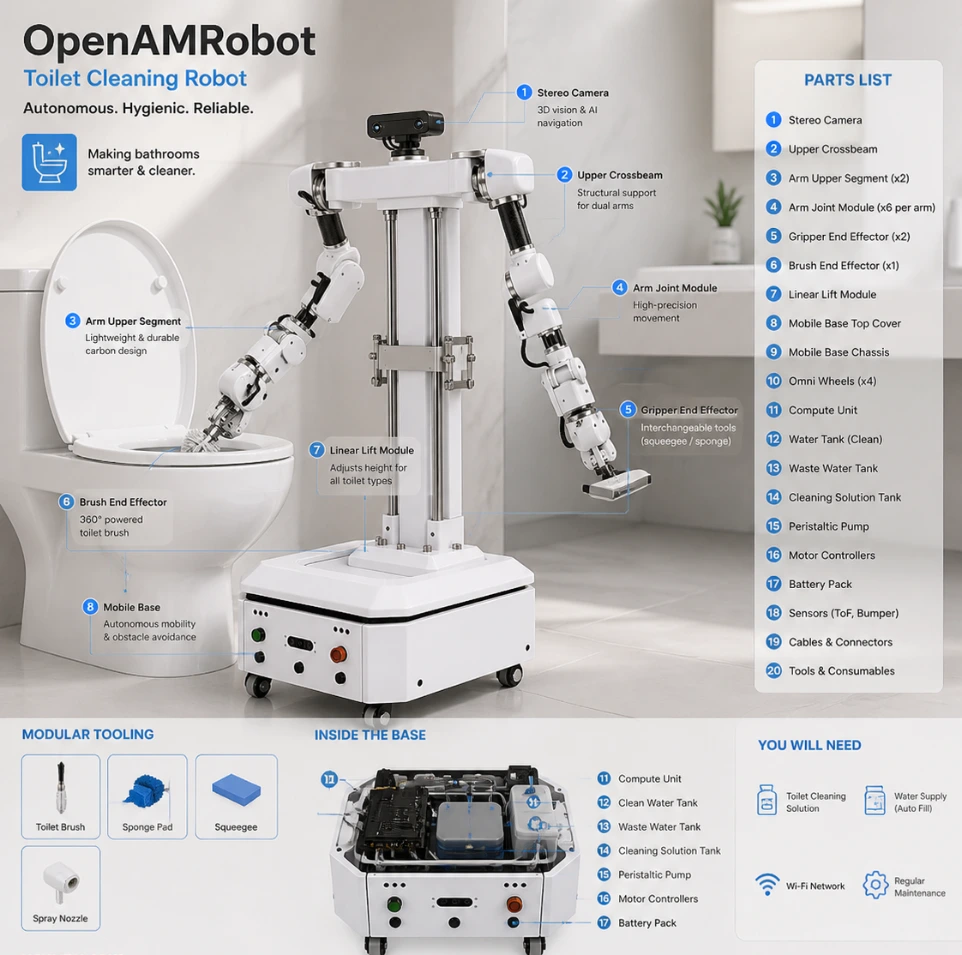
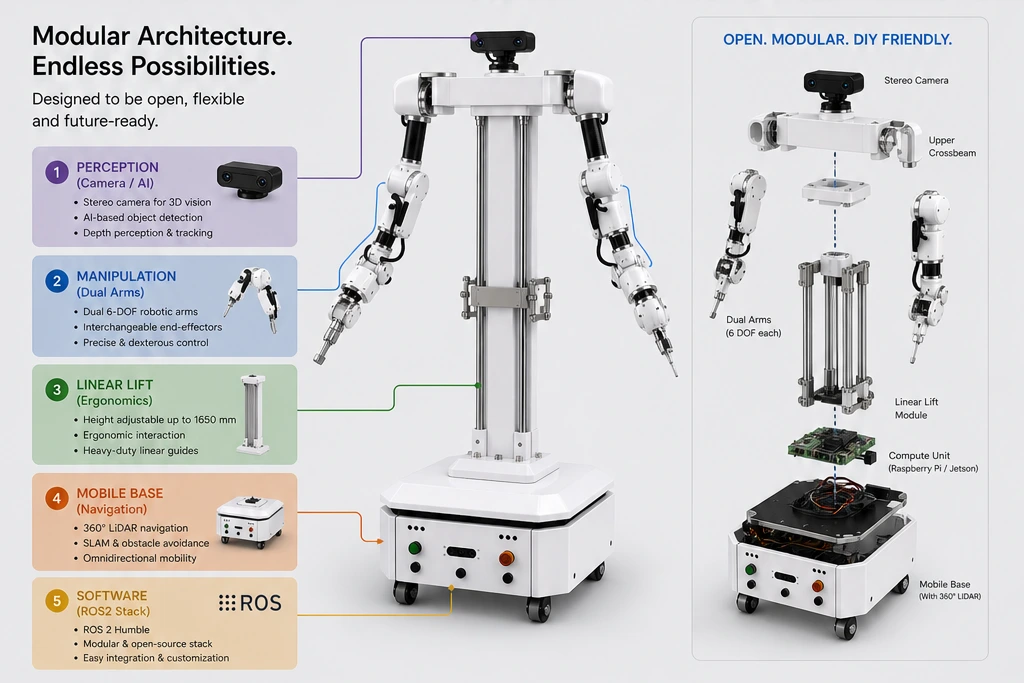
The OpenAMR platform is designed as a modular robotic system consisting of:
- Autonomous mobile base
- Industrial battery and power system
- Dual-arm robotic upper body
- Sensor suite
- Navigation and perception stack
- Interchangeable application modules
- ROS2-based software architecture
The platform is intended to serve as a reusable foundation for multiple robotic products and customer-specific solutions. Instead of developing a complete robot from scratch for every use case, customers can focus on their unique application-specific modules while leveraging an already prepared autonomous robotic infrastructure.
This significantly reduces development cost, hardware integration complexity, software groundwork effort, prototyping time, and system engineering risks.
Building a Robotic Product?
OpenAMRobot gives you a proven foundation so you can focus on your application, not the base platform.
EXPLORE OpenAMRobot VIEW ON GITHUB
Why Autonomous Toilet Cleaning Is Technically Challenging
Autonomous toilet cleaning is significantly more complex than typical floor-cleaning robotics. The robot must operate in highly contaminated environments, reflective and wet surfaces, confined geometries, biofilm-heavy zones, odor-intensive areas, and environments with strict sanitation requirements.
In addition, the system must avoid splash-back contamination, aerosol spreading, excessive water usage, and cross-contamination between areas.
For this reason, professional sanitation technologies are required.
Why Dry Steam Sanitation
After evaluating different sanitation approaches, dry saturated steam appears to be one of the most promising methods for robotic sanitary cleaning. Unlike simple hot water cleaning, industrial dry steam provides high thermal energy transfer, reduced water consumption, lower residual moisture, improved biofilm disruption, reduced chemical usage, and improved sanitation capability.
Dry steam does not mean "small water droplets." Instead, it refers to steam with very low liquid water content, typically described using a high steam dryness fraction. This is important because excessive moisture creates contamination spreading, slippery surfaces, dirty condensate, risks for robotic electronics, and inefficient cleaning.
Need Help Evaluating Feasibility for Your Robotic Application?
We provide architecture reviews and technical roadmaps for robotics, automation, and AI-enabled hardware products.
Why Menikini MK4000 Was Selected
Several industrial systems were evaluated during the preliminary research phase, including IBL VAPBIO, Menikini industrial steam systems, Karcher SGV 8/5, and WIPCOOL compact steam solutions.The Menikini MK4000 was selected as the primary reference platform because it combines industrial dry steam generation (~180°C, ~10 bar), vacuum extraction capability, integrated rinsing functionality, professional industrial accessories, and a sanitation-oriented workflow.
Steam + Vacuum Extraction Cleaning Head
One of the most important concepts in the project is the combined steam-vacuum cleaning head, designed with a central steam nozzle, surrounding vacuum extraction ring, and flexible splash skirt/shroud.
The purpose of the vacuum ring is to immediately capture condensate, aerosol, loosened contamination, dirty liquid, and splash-back particles. This significantly reduces contamination spreading and protects both the robot and surrounding environment.
Pulsed Steam Sanitation Concept
Continuous steam generation at full power is not required during the entire cleaning mission.
Instead, the system uses pulsed sanitation cycles.
Example cycle:
vacuum pre-start;
5 seconds steam burst while vacuum remains active;
5-10 seconds vacuum-only recovery phase;
repeat if contamination remains.
This approach provides several advantages:
reduced power consumption;
lower battery requirements;
reduced splash-back;
improved drying;
better aerosol capture;
improved thermal efficiency.
The vacuum system should remain active both during and after steam application.
Hydrogen peroxide post-disinfection module
The current concept also considers a separate hydrogen peroxide mist module.
Importantly, hydrogen peroxide is not mixed into the steam generator.
Instead, it is applied as a separate post-cleaning stage using:
dedicated liquid cartridge;
dosing pump;
ultrasonic or air-assisted atomizer.
This stage may help with:
final disinfection;
odor reduction;
residual biofilm reduction;
sanitation enhancement after physical cleaning.
Battery and operational concept
The target mission profile is approximately:
60-75 minutes total cleaning mission;
approximately 25-40 minutes effective steam usage;
autonomous docking and recharge;
water refill and wastewater disposal during docking.
The platform is expected to use:
approximately 6-10 kWh battery capacity;
likely 72V or 96V power architecture;
high-power charging or docking infrastructure.
Because steam is used in pulsed mode rather than continuous mode, the average power consumption remains manageable for mobile robotic operation.
Conclusion
The combination of the OpenAMRobot modular robotic platform with industrial dry-steam sanitation systems such as the Menikini MK4000 demonstrates a promising direction for future autonomous sanitation robotics.
Rather than building every subsystem from scratch, this approach allows development teams and customers to leverage an already prepared robotic groundwork while focusing on their specific application requirements.
The same autonomous dual-arm platform can later be reused for multiple applications including:
sanitation robotics;
cleaning in the Food Processing Industry
service robotics.
This modular approach reduces development risks while accelerating innovation and deployment of advanced robotic systems.